


Modern warfare comes knocking: Side-enablers and GNSS disruption
Quickly now, raise your hand if these headlines sound familiar:
 |
 |
These and other similar titles underline a crucial military transformation during our lifetimes. Modern warfare is not “WW2 but with better weapons”, and the comforts of post-Cold War COIN & intervention / regime-change ops are no longer to be taken for granted. The GPS navigation systems guiding modern platforms and weapons will likely be disrupted (in fact count yourself lucky if the satellite constellation above you survives), and the BLOS comms that forces rely upon for everything from cell-phone connectivity to drone control may or may not be available, theater-wide or locally.
So, how to represent these threats and vulnerabilities, and the opportunities arising from them, in Command?
Side Enablers
What we came up with is the concept and framework of “Side Enablers” (aka “theater access options”): Capabilities that act as force multipliers, enabling options for action – or taking them off the table if they become unavailable.
The most common such enabler is access to satellite-based navigation, particularly with regards to weapon guidance (and more recently, autonomous operation of drones). GPS is of course the most commonly referred example, but GLONASS (Russia), BeiDou (China) and NavIC (India) are also other options.
Such enablers are now available for configuration in Command when editing the properties of Sides in the Scenario Editor:


Apart from the top Side-level, these enabler items are also configurable on a local basis. The idea here is that in many cases the ability (or lack thereof) to use a certain functionality may be restricted geographically; Starlink’s “no Ukraine” geofencing for its LEO-BLOS comms service is a recent example, but another common case may be the localized jamming/spoofing of GPS on a town or frontline of interest. The reverse may also be true: A given service may be generally unavailable theater-wide but available on a specific area (local beacons for both PNT/GNSS and comms are rapidly proliferating; you can now fit some of them even on artillery shells).
The way we model area-specific availability is through the area & reference-points manager:

By selecting a zone and clicking on the new “Enablers” button, we get access to the same menu of enabler options as on the side level. Embedding this ability on zones also allows taking advantage of all the nice properties already present in them, such as anchoring them on units, contacts or reference points.
Given that the (non)availability of these services can be highly dependent on events happening during the sim execution (or player decisions), it makes sense that the enablers themselves are configurable also through Lua scripting. Here is an example of fetching the enablers for a given zone and modifying them:
local s = VP_GetSide({name='side-A'})
print(s)
local z = s.standardzones
local myz = s:getstandardzone(z[1].guid)
print(myz.enablers)
myz.enablers = {GNSS_GLONASS = true, GNSS_GPS = false}
print(myz.enablers)
GNSS disruption
So, what do all these enablers actually buy/deny you “in the field”?
The first concrete implementation of the enablers framework is, to no-one’s surprise, GNSS disruption. This is a large topic of discussion in western defence circles as an acknowledged vulnerability, given that so many different weapon systems since Desert Storm have come to rely on GPS navigation for guidance – and this trend has been also subsequently replicated in Russia, China & India (to our knowledge, the pan-European Galileo system has not yet been adopted as a guidance component on any fielded weapon system).
GNSS disruption (in the form or jamming, spoofing or complete denial of service) is a huge and highly technical subject, but in the context of terminal weapons guidance its effects are fairly simple: It significantly increases the CEP figure of anti-surface weapons, thus significantly degrading their accuracy. Such weapons typically rely on an internal inertial navigation system (INS) which acts as the primary navigation reference, with the GNSS providing a regular correction to the INS’s inevitable drift. If GNSS is denied, the weapon has to rely entirely on its INS for terminal guidance.
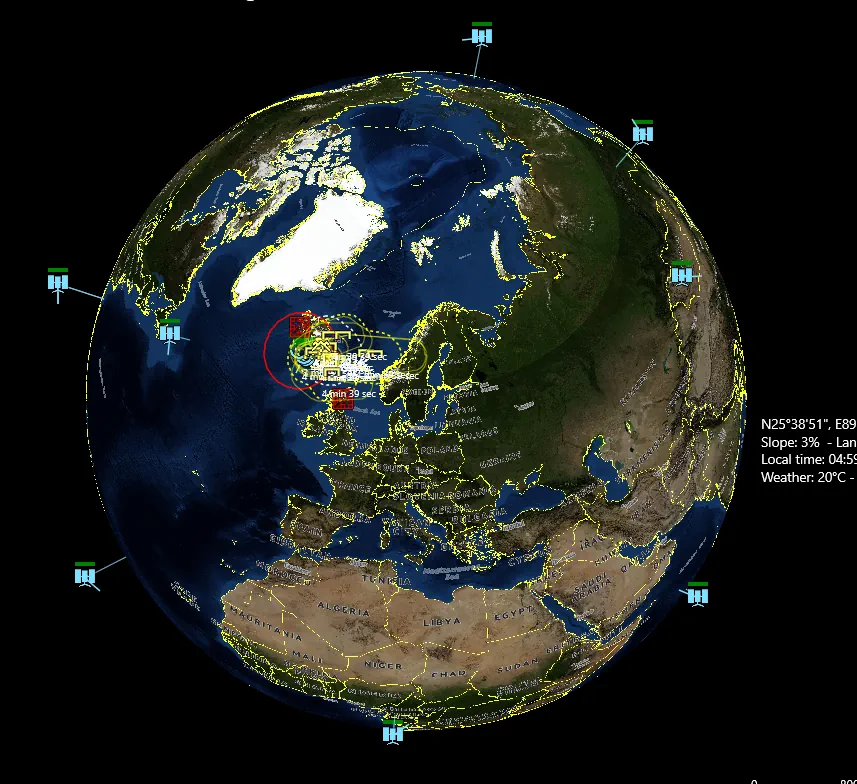
When a weapon is denied a GNSS update, a “NOGNSS” warning is shown next to the weapon icon on the map, to indicate that this weapon is suffering from such degradation:

> 8/4/2017 10:08:14 – Weapon: GBU-39/B SDB #993 has been without a GNSS update for 6 min 49 sec. Weapon has INS: 1990s+ tactical weapon INS. Max drift: 105m. Actual drift (CEP increase): 79m
Notice in this example the significant difference between max and actual drift: The max drift represents the maximum deviation from the DMPI if one assumes that all drift perturbations will cumulatively swing the weapon away from the aimpoint. A more (statistically) likely case is that the actual deviation will be somewhere between zero and max; in this case 79 meters.
There is a popular misconception on public discourse, that GNSS disruption can instantly turn a weapon useless. This is a gross exaggeration. The actual effect of such degradation on a weapon’s impact accuracy, and to its overall effectiveness, will strongly depend on the inherent accuracy of the weapon’s INS system, the time the weapon spends in a degraded state (INS drifts with time, not distance covered), the weapon’s warhead type and yield, as well as the type and physical dimensions of the aimed target.
Some recent examples illustrating this:
- According to persistent reports, ground-launched SDB (GLSDB) bombs have been ineffective in the Ukraine theater due to extensive GPS jamming/spoofing. This makes sense for a weapon like SDB, whose penetrator-explosive warhead is highly dependent on high accuracy (a near-miss does not produce any proximity damage; it’s direct-hit or bust); combined with an increased flight time (ie. more time to be exposed to GNSS disruption, depending on the reach of enemy EM activity) this creates ample opportunity to disrupt the weapon sufficiently to make it a clean miss.
- On the same theater, GMLRS guided rockets have reportedly been highly successful despite facing the very same jamming activity against them. Why? The warheads of these rockets are area weapons (they disperse bomblets) so a near miss usually is as good as a spot-on direct hit. Additionally, their small flight time reduces the opportunity for significant jamming and thus diversion. (Reportedly air-launched SDBs, the very same type as ground-launched by GLSDB, have also been a popular weapon. Why? Presumably the shorter flight time compared to the ground-launched variant makes for a sharply reduced window of GNSS-jamming vulnerability.)
- High-velocity weapons in general have an inherent advantage in such conditions because of the time-based drift on INS systems. This is an additional reason that high-speed systems (incl. hypersonics) are a popular avenue for research and development.
Note #1: The current GNSS disruption model applies only to weapons that use INS+GNSS for terminal guidance (JDAM being the prime example), and NOT to weapons that combine INS+GNSS for mid-course guidance with homing sensors for terminal guidance (e.g. most modern cruise missiles). There are a number of reasons for this, incl. the complexity of representing “actual” vs “perceived” weapon position (cue the “missile knows where it is” memes…), as well as the fact that such systems use terminal homing precisely in order to compensate for mid-course guidance errors and thus are less susceptible to GNSS disruption.
Note #2: Currently there is no distinct field in the database to mark the INS performance level of each individual weapon. For this reason a simple “deduction” algorithm is used, based on the weapon properties:
- If the weapon is a guided gun round (e.g. Excalibur) or rocket (e.g. GMLRS), assume it uses MEMS-based INS (Assumed drift: 5nm / hr).
- Otherwise, if the weapon’s maximum range is under 162NM, assume it uses a “1990s+ tactical weapon”-grade INS (Assumed drift: 0.5 nm / hr)
- Otherwise for longer-range weapons, assume it uses a “1990s+ high-grade” INS (AIRS etc.)(Assumed drift: 0.05 nm / hr)
The 162NM (300km) threshold is based on the MCTR regime rules, which treat missile weapons with a >300km range as “strategic”.
Both the Side-Enablers framework and the GNSS disruption feature are now available on the new CMO public beta released on the MG forums. Have a look through them and give us your feedback!
Promises kept: Command-PE v2.4.1 and the new sim manual now available
 Last September, at the most recent (and most awesome) Command User Event held at Quantico, we showed off the then-imminent-to-release v2.4 major release to Command PE. We also stated that a “hotfix” update was scheduled for release by the end of the year, and that the much-anticipated CPE Simulation Manual would also be made available to current PE license holders in the same timeframe, even in early draft form.
Last September, at the most recent (and most awesome) Command User Event held at Quantico, we showed off the then-imminent-to-release v2.4 major release to Command PE. We also stated that a “hotfix” update was scheduled for release by the end of the year, and that the much-anticipated CPE Simulation Manual would also be made available to current PE license holders in the same timeframe, even in early draft form.
As the year is now drawing to a close, we are happy to fulfill our promises:
* Command-PE v2.4.1 is now available for download to all current users of CPE. Intended originally as merely a hotfix release containing all the tweaks and fixes since the original 2.4 release, it has morphed into a substantial update in its own right.
Its biggest new features are the new “pin-cushion view” option for displaying aerospace units at their true altitudes (this got a lot of attention also at I/ITSEC last week), the tabular & machine-parsible “butchers bill” (list of losses & expenditures) and the option for repeatable-loop movement style on mining missions (ie. you can now define in advance the specific pattern to follow when laying mines, as well as related settings such as interval).
The new update also contains a whole slew of improvements and tweaks to the simulation engine, as well as the latest v509 release of the DB3000 and CWDB databases.
* The first version of the CPE Sim Manual that we deem share-worthy is now available. This document acts as the central point of reference for the overall design and internal simulation mechanics of CPE (and CMO) both for the Command dev team as well as professional customers (this is distinct and separate from the existing CPE & CMO user manuals, which deliberately focus on the user interface and gameplay options).
The sim manual is still in very early draft form, with numerous placeholders, unfilled or unfinished sections; even so, every single user who has glimpsed at it so far has found it extremely eye-opening, useful and illuminating. So we believe the same will hold true for any of our customers who wish to gain a deeper understanding of how Command’s simulation engine works. The sim manual is not generally available for download, but can be provided to active CPE license holders upon request.
The CPE dev team is already hard at work, developing a new set of features (and especially a pair of big whammies) that will define the next milestone of CPE some time within 2025. Stay tuned!
Command wins the 2024 TIGA award for “Educational, Serious or Simulation Game”

The complete winners list: https://tiga.org/awards/2024-winners
As a reminder, CMO previously won the 2019 Charles S. Roberts award for “Best Modern Era Computer Wargame”, and CMANO before it was “Wargame Of The Year 2013” and MS&T Magazine 2017 Finalist.
Article on Command in the Wall Street Journal
Original link (paywall): https://www.wsj.com/politics/national-security/a-million-people-play-this-video-wargame-so-does-the-pentagon-e6388f50
Text reproduced below.
A Million People Play This Video Wargame. So Does the Pentagon.
Warfare is changing at a pace unseen in almost a century, as fighting in Ukraine and the Middle East shows. For military commanders, tackling that upheaval demands fast and constant adaptation.
Increasingly, that entails playing games.
Wargames—long the realm of top brass and classified plans—let strategists test varying scenarios, using different tactics and equipment. Now they are filtering down the ranks and out among analysts. Digitization, boosted by artificial intelligence, helps yield practical lessons in greater safety and at lower cost than staging military maneuvers would. Wargames can also explore hypotheticals that no exercise could address, such as nuclear warfare.
Proponents of wargames include Tim Barrick, a retired Marine colonel who is now wargaming director at Marine Corps University. He drills students using board games and computers. In one online exercise, he pushed eight Marine majors repeatedly through the same Pacific military engagement, using a program called Command: Professional Edition.
This software is unusual because it didn’t originate with a defense contractor or institute, as most wargames do. It is a simulation program built and marketed by gamers with almost no military background—and rooted in Tom Clancy novels. Users of all stripes have made it a surprise hit.
Over the two months that Barrick’s Marine majors played Command PE, as it’s known, their creativity grew.
“These are not simple problems,” said Barrick, who previously ran the Marine Corps Warfighting Lab’s wargaming division. “It’s not like we’re asking them to play checkers.”
The game has become a surprise hit, for users of all stripes. The Air Force recently approved Command PE to run on its secure networks. Britain’s Strategic Command just signed up to use it in training, education and analysis, calling it a tool “to test ideas.” And Taiwanese defense analysts tap Command PE to analyze responses to hostility from mainland China.
Command’s British publisher, Slitherine Software, stumbled into popularity. The family business got started around 2000 selling retail CD-ROM games like Legion, involving ancient Roman military campaigns.
When Defense Department officials in 2016 first contacted Slitherine, which is based in an old house in a leafy London suburb, its father-and-son managers were so stunned they thought the call might be a prank.
“Are you taking the piss?” J.D. McNeil, the father, recalled asking near the end of the conversation.
What drew Pentagon attention was the software’s vast, precise database of planes, ships, missiles and other military equipment from around the world, which allows exceptionally accurate modeling.
Former Air Force Air Mobility Command analyst Pete Szabo started using Command around 2017 to model military planes’ fuel consumption in battle scenarios.
“It’s been a very powerful tool for us,” said the retired Air Force lieutenant colonel. Convincing his superiors to employ commercial, off-the-shelf gaming software, though, took some work, he recalled. “At first it was like, ‘Nooooo.’ ”
Some officers have long derided wargames as entertainment, navel-gazing or “bogsats,” short for “bunch of guys standing around talking.” But the simulations—especially digital ones—can hone decision-making, spatial awareness and maneuvering abilities, say advocates.
“There’s no doubt that skills in a game matter on the battlefield,” said Arnel David, a U.S. Army colonel who advises the North Atlantic Treaty Organization’s top general and helps lead an informal organization to promote wargaming of all sorts, called Fight Club International.
Wargaming, which first took its modern form in Prussia about 200 years ago, got a boost in the U.S. in 2015 when then-Deputy Secretary of Defense Robert Work warned that the Pentagon’s wargaming skills had “atrophied.” The military services scrambled to up their game.
Traditionally conducted using maps, grids and dice—essentially sophisticated cousins of familiar board games like Risk and Stratego—some wargames entail tabletop models that resemble electric-train sets or require an entire room.
Computer wargames still generally resemble complex maps more than first-person shooter games such as Call of Duty. But their speed and processing power allow operators to run and rerun scenarios at a tempo never before possible, and to generate scads of data for analysis.
In a project called Gamebreak for the Pentagon’s Defense Advanced Research Projects Agency in 2020, scientists at military contractor Northrop Grumman developed AI models to essentially play Command PE, processing more than 200 quadrillion options—or 2 followed by 17 zeros.
AI is increasingly helping users create scenarios, run games and sift through results for trends and surprises. French wargame maker MASA Group boasts that AI allows its Sword program to be run more easily than rivals’ systems.
Whether AI and advanced software actually improve wargaming and preparations for war is a question sparking battles of its own. Warfare is so complex—buffeted by factors ranging from equipment and strategy to politics, weather and corruption—that modeling all the inputs entails parsing an almost infinite number of variables. Quantifying unquantifiables such as military morale requires arbitrary decisions.
“If all your data for a simulation is garbage, it’s garbage out too,” said Anna Knack, who leads research on AI and security at Britain’s Alan Turing Institute, a government-funded research center.
A Million People Play This Video Wargame. So Does the Pentagon.© Kevin Ray J. Salvador/U.S. Marine CorpsSkeptics say digital wargaming, in an unintended twist, may actually reduce understanding of scenarios because software’s underlying algorithms aren’t accessible to users.
“It takes some of the human decision-making element away,” said Becca Wasser, who leads the Gaming Lab at the Center for a New American Security, a think tank in Washington.
Advocates say computerization expands enormously both the usefulness of wargames and their range of potential users, often complementing manual games.
“It’s a tool in a toolkit,” said David, who served in Iraq and Afghanistan.
Not all wargames involve combat. NATO, which in 2021 adopted warfighting guidelines that call for “audacious wargaming,” also runs crisis-management simulations. U.S. Transportation Command runs wargames involving shipments and logistics, its area of responsibility.
Wargames that focus on a specific field, such as logistics, are relatively straightforward to design, while modeling big conflicts is vexing.
To simulate a Chinese invasion of Taiwan in a tabletop game played between teams of specialists in 2022, modelers hosted by the Center for Strategic and International Studies think tank in Washington spent more than a year designing and preparing the project. Each of 22 iterations took a full day, between which the designers adapted the game to address new issues from each running.
It was a simple battle simulation that Navy Lt. Larry Bond wanted to create in 1980, after using the service’s complex training game, Navtag, onboard his destroyer.
Bond created Harpoon, published as a paper-and-dice game that drew a big following thanks to its extensive technical data on military systems. One fan was insurance-agent-turned-author Tom Clancy.
Clancy tapped Harpoon as a source for his first novel, “The Hunt for Red October,” and used it so extensively in writing his 1986 follow-up, “Red Storm Rising,” that he called himself and Bond “co-authors.”
A Million People Play This Video Wargame. So Does the Pentagon.© Elizabeth Frantz for WSJA home-computer version of Harpoon flourished and then faded early this century. Frustrated fan Dimitris Dranidis sought to replace it. The result, Command: Modern Operations, released in 2013, took off as users—many in the military—added and corrected its open-source database.
The database now includes tens of thousands of items, from bullets to bombers, covering almost every front-line piece of equipment used by all the world’s militaries since 1946. Users keep parameters like fuel capacity and operating range accurate.
After Work’s 2015 Pentagon memo sent the services scurrying to rediscover wargaming, an Air Force official stumbled on Harpoon and contacted Slitherine, which held the publishing rights. The McNeils introduced him to Command, which they were also publishing as a consumer game.
“It never even occurred to me that we’d work with militaries,” said Chief Executive Iain McNeil, whose father, J.D., had previously owned a scaffolding business.
The Air Force sent two retired generals to assess the company, seeking to better understand its operations and Command’s database. They invited the McNeils and Dranidis for meetings at the Pentagon, where the newbies shot selfies standing behind the briefing-room lectern.
Slitherine created a version of Command for military and intelligence-agency needs, Professional Edition, addressing their security requirements and allowing them to upload classified data without giving access to programmers or other users, Iain McNeil said.
In the military world, most acquisitions undergo more rigorous testing than consumer products for battle-readiness, but Command flips that paradigm thanks to its evolution. With roughly one million commercial users, Command “gets beat up by the community to a degree that the defense industry just can’t do,” said Barrick, the Marines instructor.
Command focuses on battles and engagements, not campaigns or wars. “It’s really useful if you want a very close look—almost through a soda straw,” said Wasser at CNAS, who sees it as an excellent tool for training and education.
Education was one of the top uses cited at a conference of Command military users in Rome hosted by the Italian Air Force last year, attended by civilian and uniformed defense professionals from the U.S., the U.K., Taiwan and beyond.
German Air Force Lt. Col. Thomas Silier explained how Command offered a way to teach mission planning that mixed classroom theory and real-world experience.
In his seminars, a group of around 20 pilots would face an emergency, like defending a target from an incoming attack. They planned mission timelines and assessed factors such as flying time with a given fuel load. Their proposals were fed into Command, and the simulation played out on a big screen in the classroom.
“It’s a stadium-like atmosphere,” with students cheering when missiles hit the enemy, said Silier. “One student told me it’s more exciting than a Champions League football match.”
Write to Daniel Michaels at Dan.Michaels@wsj.com and Juanje Gómez at juanje.gomez@wsj.com
“This is truly awesome!”*: Command PE v2.4 now available
 * Actual quote from early-bird pro user
* Actual quote from early-bird pro user
It has taken a while, but the wait is most definitely worth it. CPE v2.4, the next major update for Command Professional Edition, is now available for download to all professional users.
The headline feature of the new release is most definitely the addition of Real-Time Multiplayer (RTMP), a brand-new capability to Command. (As a reminder, CPE has offered WEGO-style multiplayer since version 1.15). The new system offers several key features and advantages:
– Real-time execution and UI update means participating players can view progress updates and issue orders dynamically as the scenario unfolds, instead of having to wait for the next “checkpoint in time” as in WEGO.
– Up to 16 players can participate in a single MP session.
– Multiple players can play under the same or opposing side. The importance of this feature (which is not available in WEGO) is hard to overstate: One of the challenges of CPE is that, for any non-trivial scenario, the single payer may wear “too many hats” (from theater commander all the way down to mission planner & weaponeer). RTMP allows players to organize their assets to players, effectively demolishing this limitation.
– Multiple umpires and observers. Umpires have unlimited hand-of-God powers (can edit the scenario at any point in time) and can witness the action from any side’s point-of-view, in addition to being able to see everything (no fog-of-war). Observers have the umpire’s omniscience but none of the editing abilities.
– Time progression is either real-time or accelerated.
– The scenario state can be rewound/reverted to any previous point in time, and resume from there.
– Players can arbitrarily leave and rejoin an ongoing session at any point.
The RTMP feature was until now available only to select early-bird customers in a dedicated development branch based on CPE 2.0, and was demonstrated at the recent CUE. Now, it uses the baseline development path and is available as a license option.
(Contact Matrix Pro Sims for pricing information on a RTMP license)
CPE v2.4 also benefits from the massive “get well” development work over the last year, like its commercial counterpart CMO v1.07. Other significant features of the new release include:
- Significant improvements in stability and performance, in addition to a large and diverse array of gameplay and simulation fixes.
- Further progress on the ATO compliance process. As part of this, various security vulnerabilities have been identified and removed or mitigated. CPE is now included on the USAF Evaluated Products List (EPL), which clears it for deployment on USAF protected systems and networks.
- Significant improvements to UI for heterogenous/mixed groups, greatly facilitating Manned-Unmanned Teaming (MUM-T) operations.
- A new non-lethal weapon type: Laser Dazzlers. Although subject to the same atmospheric-absorption effects, these are distinct from high-energy laser (HEL) weapons and have different effects.
- A new HTML-rendering backend, using Microsoft’s new WebView2 rendering engine. You should notice improved HTML rendering on the DB-viewer and other UI elements that use HTML sources. This also allows richer custom UI elements at the beginning of a scenario (e.g. to define custom options for the scenario, difficulty settings etc.)
- A new wrinkle on air-to-air refueling: Aircraft fuel on-load rate restriction (requires v508+ DBs). When large tankers such as KC-135s or KC-46s refuel tactical aircraft, the bottleneck on fuel transfer is usually not the tanker’s offload capacity, but the intake rate of the receiver aircraft. This is now properly modelled.
- Indicators for aircraft contrails and ship/submarine wakes can now be displayed on the map, under unit datablocks. This makes it easier for the player to be more aware that his units may be visually detected at significantly longer ranges because of these factors. These indicators can be disabled on the “Map Settings” menu if they clutter the map unacceptably.
(Clarification: Contrails and wakes have been part of the simulation engine since Command’s original 2013 release. This change adds visual indicators for them.) - Various “quality of life” improvements across the UI and particularly on the mission editor and various strike-planner windows.
- The latest releases of the DB3000 and CWDB databases, with the completion of a major year-long milestone: The China national review (see this overview for more details). The Command database is now arguably one of the most comprehensive open-source compilations of information on modern Chinese military platforms.
The CPE dev team is already busy assembling the first hotfix update for this momentous release, as well as preparing for a new set of features that will define the next milestone of CPE some time within 2025. Stay tuned!
- What is 'Command'?
- Professional Edition
- Awards & Press
- Customer Testimonials
- Scenario & Add-On Downloads
- Mega-FAQ
- Official Forum
- Contact Us
- Links
-

- What is 'Harpoon'?
- Waypoint Magazine
- Harpoon3.6 1937-1949
(WW2)
Database & Scenarios - Harpoon3.6 1950-1964
(Colonial Wars)
Database & Scenarios - Harpoon3.6 1965-1979
(Missile Age)
Database & Scenarios - Harpoon3.6 1980-2015
(DB2000)
Database & Scenarios -
Archives
- February 2025
- January 2025
- December 2024
- November 2024
- October 2024
- September 2024
- July 2024
- May 2024
- February 2024
- December 2023
- October 2023
- September 2023
- August 2023
- July 2023
- May 2023
- March 2023
- January 2023
- December 2022
- November 2022
- October 2022
- September 2022
- August 2022
- March 2022
- November 2021
- October 2021
- September 2021
- August 2021
- May 2021
- April 2021
- March 2021
- October 2020
- May 2020
- March 2020
- February 2020
- January 2020
- November 2019
- October 2019
- September 2019
- May 2019
- March 2019
- February 2019
- January 2019
- November 2018
- October 2018
- September 2018
- July 2018
- May 2018
- March 2018
- February 2018
- January 2018
- November 2017
- October 2017
- September 2017
- July 2017
- May 2017
- April 2017
- March 2017
- February 2017
- January 2017
- December 2016
- November 2016
- October 2016
- September 2016
- August 2016
- July 2016
- May 2016
- April 2016
- March 2016
- February 2016
- January 2016
- December 2015
- October 2015
- September 2015
- August 2015
- July 2015
- June 2015
- May 2015
- April 2015
- March 2015
- February 2015
- January 2015
- December 2014
- November 2014
- October 2014
- September 2014
- August 2014
- July 2014
- June 2014
- May 2014
- April 2014
- March 2014
- February 2014
- January 2014
- December 2013
- November 2013
- October 2013
- September 2013
- August 2013
- July 2013
- June 2013
- May 2013
- April 2013
- February 2013
- January 2013
- December 2012
- October 2012
- August 2012
- July 2012
- April 2012
- January 2012
- November 2011
- October 2011
- September 2011
- July 2011
- May 2011
- April 2011
- March 2011
- February 2011
- December 2010
- November 2010
- October 2010
- August 2010
- June 2010
- May 2010
- April 2010
- March 2010
- February 2010
- January 2010
- December 2009
- November 2009
- October 2009
- September 2009
- August 2009
- July 2009
- June 2009
- May 2009
- April 2009
- February 2009
- December 2008
-
Recent Posts
- Command: Fail Safe has been released!
- Modern warfare comes knocking: Side-enablers and GNSS disruption
- A Christmas gift: Community Scenario Pack #50 now available
- Promises kept: Command-PE v2.4.1 and the new sim manual now available
- Command wins the 2024 TIGA award for “Educational, Serious or Simulation Game”
Main Menu
Webshop
BUY at MatrixGamesBUY on Steam
BUY on Humble store
